Earth Observation science to understand a changing planet

Latest News


Registration Now Open – UK Earth Observation Conference 2026

We are pleased to announce that registrations are now open for the UK Earth Observation Conference 2026.
UKEO 2026 will bring together the UK’s Earth observation community across research, industry, government and policy to share the latest science, applications and innovations shaping our use of Earth observation data and technology. The conference will provide a key forum to exchange ideas, build collaborations and explore how EO supports national and global priorities.
Our Research
Earth observation satellites have a unique vantage point on the world enabling us to identify, review and track regional and global trends consistently, and to trace their influence across the planet.
At NCEO, we harness data from satellites, aircraft, and ground-based instruments to study the Earth System and its continually changing nature, ranging from variations in atmospheric composition to the carbon content of forests.

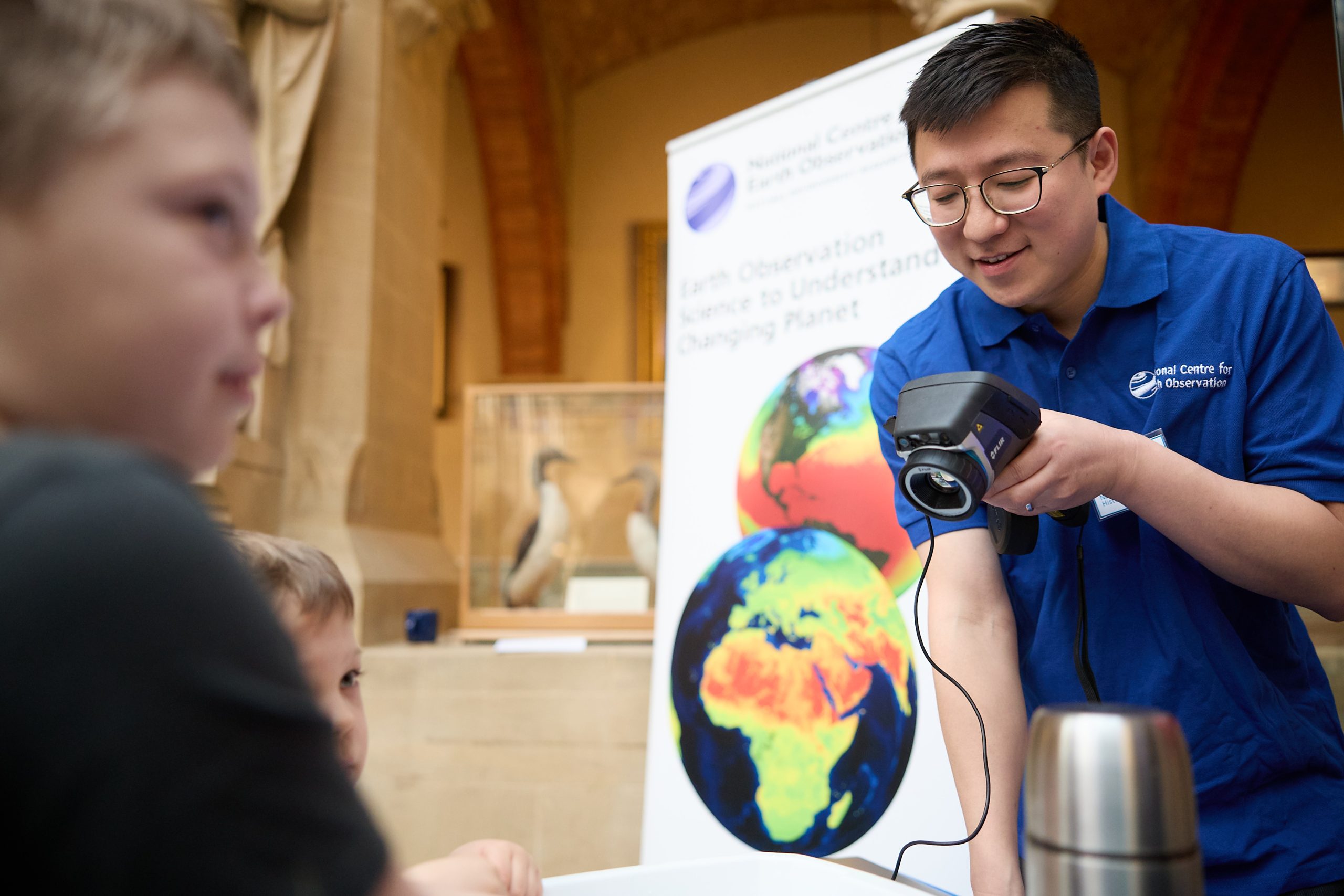
Education
We make Earth observation exciting and accessible for students and educators. From interactive resources to real-world climate data, we’re helping the next generation explore our planet from space.
The NCEO outreach team has produced and contributed to a wide range of resources for teaching and learning about climate change and Earth observation. These include materials for schools – many of which are also suitable for home learning – and games and websites to help you find out more.
Training
Free, online training courses, produced by NCEO experts, in a variety of Earth observation topics including data assimilation, data processing and monitoring atmospheric composition.
Please contact training@nceo.ac.uk with upcoming proposals for new technical training courses so that they can be included in our plans.


Working with us
We are constantly looking for talented and passionate individuals with a wide range of skills, abilities and experience to join our organisation, including theoretical and practical researchers, finance and administrative colleagues, and business and outreach communicators, to name just a few.
If you’d like to put your skills and capabilities to work in an organisation that values scientific progress and integrity, please consider our current opportunities or contact us through the link below.
